Каминский А.Е.
Введение
В работе рассматривается методика совместной инверсии времен прихода преломленных и отраженных волн. Данное направление сейчас популярно и широко используется за рубежом для решения задач глубинной сейсморазведки.
Основными подходами к совместной интерпретации данных преломленных и отраженных волн являются:
- Полноволновая инверсия во временной или частотной области (Zhou et all, 2003)
- Совместная инверсия времен прихода отраженных волн и первых вступлений (Hobro et all., 2003)
Первое направление имеет ряд существенных ограничений при использовании в инженерной сейсморазведке. Второе направление, применительно к малоглубинным изысканиям, рассматривается в рамках данной работы.
В инженерной сейсморазведке уже достаточно давно совершаются попытки выделения отраженных волн для получения дополнительной информации. Ведь как известно, использование только рефрагированных волн при интерпретации дает слишком грубое представление о скоростном разрезе (рис.1).
К сожалению, в большинстве случаев, для данных полученных при инженерных изысканиях, выделить отраженные волны затруднительно, так как они сильно “зашумлены” другими типами волн. Так как задача выделения отраженных волн является самостоятельным, чрезвычайно сложным направлением - здесь она рассматриваться не будет. Примем, что для определенного профиля выделены первые вступления и времена прихода отраженных волн для n-го количества границ.

Рисунок 1 Результаты двумерной инверсии полевых данных сейсмотомографии на рефрагированных волнах.
Предпосылки к совместной интерпретации преломленных и отраженных волн
Основные минусы сейсморазведки на рефрагированных волнах хорошо известны, это:
- Относительно малая глубинность исследований
- Определенные требования к скоростному разрезу
- Низкая разрешающая способность
Интерпретация времен прихода тоже имеет ряд ограничений, особенно при изучении верхней части разреза:
- Отраженные волны часто “загрязнены” другими типами волн
- Трудности корреляции при сложной геометрии границ
- Годографы имеют более сложный вид
Анализ плюсов и минусов обоих направлений приводит к мысли о совместной инверсии времен прихода преломленных и отраженных волн. Это может дать нам следующие преимущества:
- Хорошо разрешение в верхней части дают рефрагированные волны
- Отраженные волны позволяет увеличить глубинность и устойчивость результата за счет хорошего лучевого покрытия (даже при наличии только одной отражающей границы)
- Более четкое определение геометрии отражающей границы за счет правильного определения скоростного разреза
Основным условием совместного использования является не слишком большое различие глубины проникновения преломленных волн и опорной отражающей границы.
Расчет времен первых вступлений и отраженных волн
Прямая задача – расчет времен первых вступлений и прихода отраженных волн для среды с произвольной распределением скоростей и геометрии отражателей базируется на методе Shortest path (Moser, 1991). Этот метод позволяет рассчитать кратчайший путь, по которому проходит рефрагированная волна. Комбинация траекторий лучей минимального пробега от источника и приемника к отражателю позволяет построить путь отраженной волны для каждой границы. В качестве точки отражения выбирается участок границы с минимальным суммарным временем пробега от источника и приемника. Таким образом алгоритм расчета сводится к трем основным этапам:
- Для каждой пары источник-приемник, рассчитывается два нисходящих фронта к отражающей границе
- Вдоль отражающей границы получаем 2 распределения времен пробега от источника и приемника
- Точка отражения выбирается исходя из двух условий: минимальная сумма времен пробега, угол падения равен углу отражения
Использование данного метода снимает ограничение на сложность рельефа и углы наклона отражающей границы, что позволяет применять его для интерпретации данных инженерной сейсморазведки.
Прямая задача была реализована для двух типов модели. В первом варианте скоростной разрез задается набором слоев с произвольной геометрией границ и произвольным распределением скорости вдоль профиля в каждом слое (рис. 2). Сложность геометрии границ контролируется количеством узлов. Любая граница может быть отражающей и преломляющей, либо только преломляющей. К преимуществам данного варианта модели следует отнести возможность совместной интерпретации P и S волн в рамках одной геометрии границ. Также его удобно использовать при разреженной системе наблюдений. Во втором варианте модель разбита регулярной сетью ячеек с произвольными значениями скоростей. Отражающие границы задаются произвольно и не связаны с геометрией ячеек. Такой тип модели удобно использовать для плотных сетей наблюдений, таких как сейсмотомография.

Рисунок 2 Годографы и лучевая схема отраженных(A) и преломленных (B) волн для четырехслойной среды с произвольным распределением скоростей и геометрией границ.
К дополнительным положительным характеристикам алгоритма следует также отнести возможность естественного учета рельефа поверхности измерений, анизотропии скоростей и параметра затухания.
Тестирование алгоритма решения прямой задачи проводилось для ряда аналитических решений и с использованием сторонних алгоритмов. Shortest path метод основан на теории графов, и обладает контролируемой точностью, поэтому при достаточно плотном разбиении границ удавалось добиться невязки менее 0.01 процента.
Алгоритм решения обратной задачи
Для решения обратной задачи использовался, уже ставший классическим линеаризованный метод наименьших квадратов в модификации Occam (Constable et all, 1987). Основной сложностью при совместной инверсии скоростей и положений узлов границ является несоответствие их размерностей. Это крайне негативно сказывается на свойствах конечной системы. Для уменьшения динамического диапазона матрицы, при инверсии были использованы логарифмические нормы параметров – скоростей и локальных мощностей слоев и логарифмические нормы кажущихся скоростей. Переход от глубины границы слоя к мощности позволил избежать проблемы пересечения границ в результирующей модели. Также, чтобы подавить сильные осцилляции границ, был использован дополнительный параметр контролирующих относительную скорость изменения скоростей и границ. Сглаживающий оператор строился по-разному для двух типов моделей. В первом случае сглаживание производится отдельно для каждого слоя в горизонтальном направлении. Во втором варианте строится общий оператор для сглаживания скоростей в вертикальном и горизонтальном направлении и дополнительный для сглаживания мощностей слоев для соседних узлов границы внутри слоя.
Тестирование инверсии
Алгоритм инверсии тестировался на синтетических данных, полученных для нескольких типов скоростных разрезов. В качестве основного, был выбран четырехслойный разрез с произвольной геометрией границ, наличием аномальных по скорости объектов внутри слоев и отражающем основанием. Для основания разреза скорость упругих волн была постоянна. Шаг дискретизации границы соответствовал удвоенному расстоянию между сейсмоприемниками. Система наблюдений соответствовала сейсмической томографии с пунктом возбуждения на каждом сейсмоприемнике. Непосредственно, перед каждым циклом инверсии на синтетические годографы накладывалась шумовая составляющая разной амплитуды.
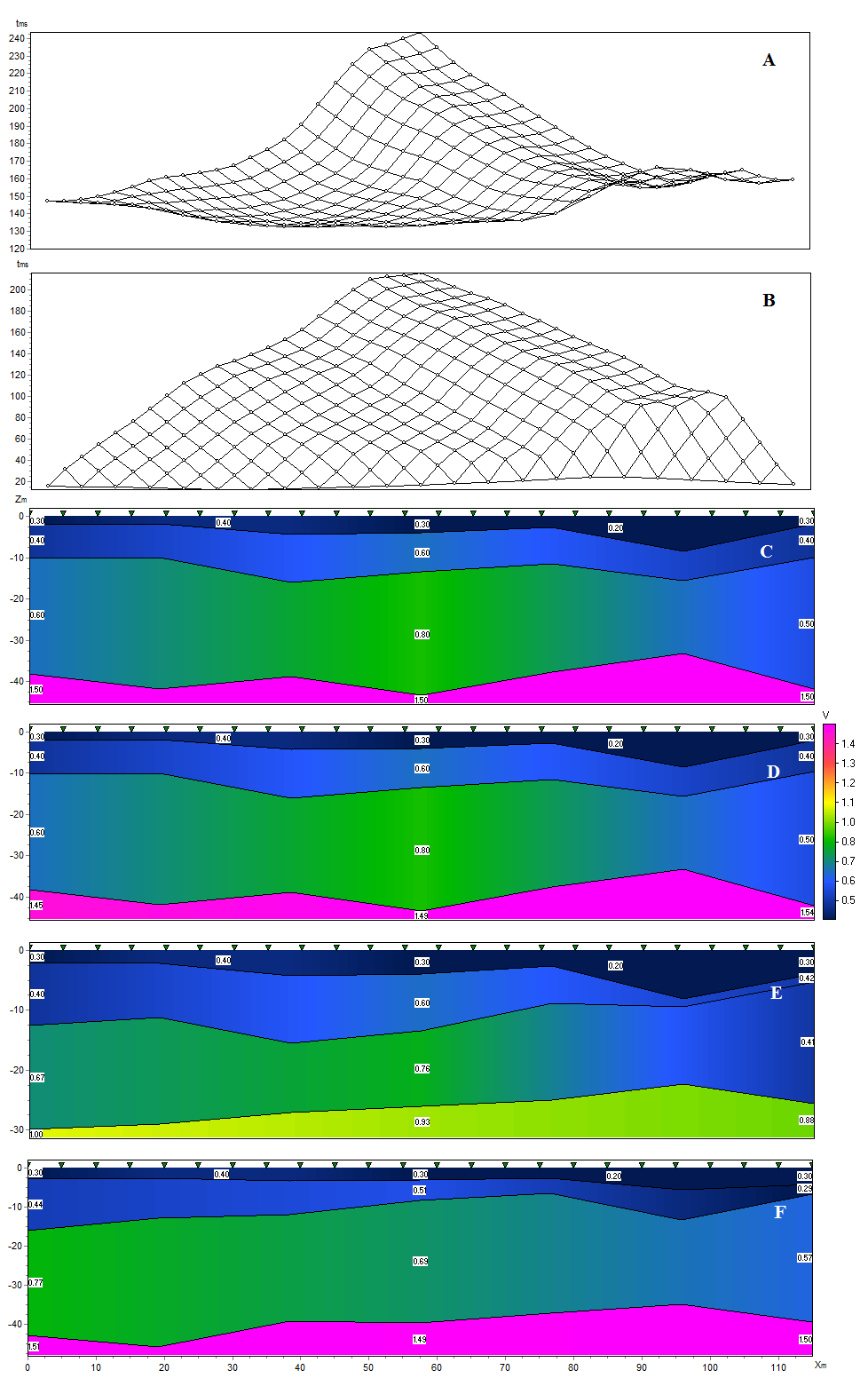
Рисунок 3 Пример инверсии синтетических данных отраженных и преломленных волн. A – расчетные годографы отраженных волн для модели C; B – расчетные годографы преломленных волн для модели C; C – оригинальная модель с отражающим основанием; D – результат совместной инверсии отраженных и преломленных волн; E - результат инверсии только преломленных волн; F - результат инверсии только отраженных волн.
Рисунок 2 демонстрирует результаты тестирования алгоритма для произвольной слоистой модели. Верхняя часть разреза представлена низкоскоростными осадочными образованиями, в основании лежат плотные скальные породы.
Система наблюдений состояла из 24 геофонов расположенных через 5 метров, с пунктом возбуждения на каждом.
Как видно из рисунка лучший результат получен при совместной инверсии данных отраженных и преломленных волн.
Тестирование производилось следующим образом:
На первом этапе инвертировались только времена первых вступлений для первого и второго типов модели. В качестве начального приближения использовалась горизонтально-слоистая среда с постоянным градиентом скоростей.
На втором этапе скоростной разрез подбирался по временам прихода отраженных волн для первого и второго типов модели. В качестве начального приближения использовалась горизонтально-слоистая среда с постоянным значением скорости.
На третьем этапе проводилась совместная инверсия данных преломленных и отраженных волн. Как показал наш опыт, при работе с синтетическими данными, для достижения приемлемой невязки достаточно было трех-четырех итераций.
В заключение, полученные модели сравнивались с исходной.
Результаты тестирования для широкого класса моделей показали существенное улучшение точности определения параметров при совместной инверсии данных.
Также было проведено исследование влияния количества данных (рис.4) и шумовой составляющей (рис.5) на результат инверсии.

Рисунок 4 Пример инверсии синтетических данных отраженных и преломленных волн при полной и разреженных системах. A – 24 пункта возбуждения; B – 12 пунктов возбуждения; C – 6 пунктов возбуждения.
Анализ результатов для систем наблюдений с различной плотностью пунктов возбуждения показал не слишком сильное снижение разрешающей способности.
Рисунок 5 Пример инверсии синтетических данных отраженных и преломленных волн при разном уровне шумовой составляющей. A – оригинальная модель;. B – восстановленная, шум – 5 мсек; C - шум –10 мсек.
Алгоритм совместной интерпретации данных преломленных и отраженных волн реализован в программе ZondST2D и в настоящее время проходит стадию тестирования на полевых материалах (рис.6).

Рисунок 6 Результат инверсии полевых данных (отражающая граница в основании разреза). A – отраженные и преломленные;. B –только преломленные.
Для тестирования на полевых материалах использовалась система наблюдений с 48 геофонами через 2 метра и 9 пунктами возбуждения через 12 метров. Количество данных участвующих в инверсии составляло: 362 - для рефрагированных, 160 - для отраженных волн. Конечная относительная невязка после инверсии составила 5.2 процента.
Выводы
Предложенный в данной работе алгоритм может быть использован для обработки данных, как “большой”, так и малоглубинной сейсморазведки. Совместная инверсия данных отраженных и преломленных волн существенно повышает качество результирующих скоростных разрезов.
Ссылки
- Zhou B., Greenhalgh, S.A., Crosshole seismic inversion with normalized full-waveform amplitude data, Geophysics, 68, 2003.
- J.W.D.Hobro, S.C.Singh,T.A.Minshull, Three-dimensional tomographic inversion of combined reflection and refraction seismic traveltime data. Geophysical Journal International, 152, 2003.
- Moser T.J., Shortest path calculation of seismic rays, Geophysics, 56, 1991.
- Constable S.,Parker R., Constable C. Occam's inversion: A practical algorithm for generating smooth models from electromagnetic sounding data, Geophysics 52, 1987.
No comments:
Post a Comment