Каминский А.Е.
Zond software kaminae@yandex.ru
Аннотация
Разработан алгоритм для совместной двумерной интерпретации данных электротомографии и магнитотеллурических зондирований. Алгоритм реализован в программе ZondRes2D и протестирован на ряде синтетических и полевых примеров. Результаты тестирования показали высокую эффективность данного подхода и значительное повышение качества получаемых результатов при решении сложных геологических задач.
Ключевые слова: электротомография, магнитотеллурические зондирования, совместная инверсия геофизических данных.
Комплексирование геофизических методов один из наиболее эффективных приемов повышения надежности результатов интерпретации [1]. Комплексирование геофизических методов уже достаточно давно существует как отдельное направление разведочной геофизики. Удачное сочетание геофизических методов порой позволяет решить самые сложные геологические задачи.
Вопросами совместной интерпретации данных электрических и электромагнитных зондирований занимаются более 40 лет. К настоящему времени известно более десятка работ [2,4] в данной области, однако все они не были доведены до программного исполнения. Отсутствие подобного инструмента интерпретации послужило толчком к разработке программы для совместной двумерной инверсии данных электротомографии и магнитотеллурических зондирований.
Совместная интерпретация данных электрических и электромагнитных методов является надежным инструментом повышения качества получаемых результатов. Улучшение качества в данном случае, связано с различной чувствительностью электрических и электромагнитных методов к параметрам геоэлектрического разреза. При этом значительно сужается область эквивалентности решения обратной задачи [4].
Электротомография успешно применяется при решении многих геологических задач, однако, обладает рядом недостатков: довольно низкой производительностью, сильным влиянием верхних экранирующих плохо проводящих отложений, а также сравнительно небольшой глубинностью и вертикальным разрешением. Кроме того, существует проблема эквивалентности тонкого слоя, заключающаяся в невозможности раздельного определения его удельного сопротивления и мощности.
В отличие от электротомографии, электромагнитные зондирования характеризуются высокой производительностью и большой глубинностью. Плохо проводящие горизонты не являются препятствием для распространения электромагнитного поля, что позволяет проводить работы в зимнее время и в районах развития высокоомных приповерхностных отложений. С другой стороны, электромагнитные зондирования чаще всего малопригодны для изучения верхней части разреза на глубинах до нескольких метров и менее чувствительны к слоям высокого сопротивления. Перечисленные выше особенности электрических и электромагнитных методов наводят на мысль об их взаимной дополнительности и целесообразности их совместного применения при изучении геоэлектрического разреза (Рис.1).
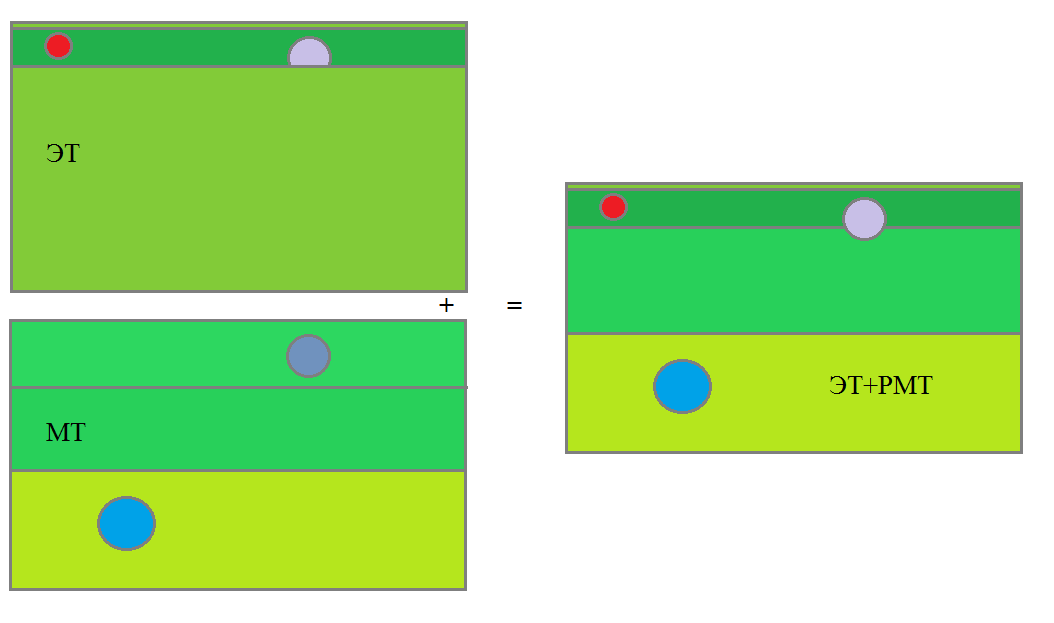
Рис.1. Схема получения результата при совместной инверсии.
В 2011 году нашей группой был представлен алгоритм для одномерной совместной инверсии данных электрических и электромагнитных зондирований [3], реализованный в серии одномерных программ Zond. В данном докладе мы предлагаем двумерное решение данной задачи.
Нами реализован алгоритм для совместного решения обратной задачи электротомографии и магнитотеллурических зондирований (в широком частотном диапазоне) на базе программ ZondRes2D [5] и ZondMT2D. Решение использует совместный функционал невязки, контролирующий значимость того или иного типа данных. Для борьбы с гальваническими эффектами в магнитотеллурическом методе использовалось методика подбора статических сдвигов при инверсии.
Главной проблемой при совместной интерпретации данных является разная масштабность комплексируемых методов, то есть разные длины волны по отношению к геологическому объекту и площади интегрирования регистрируемого сигнала. Это может иногда приводить к появлению ложных объектов на результирующем двумерном изображении.
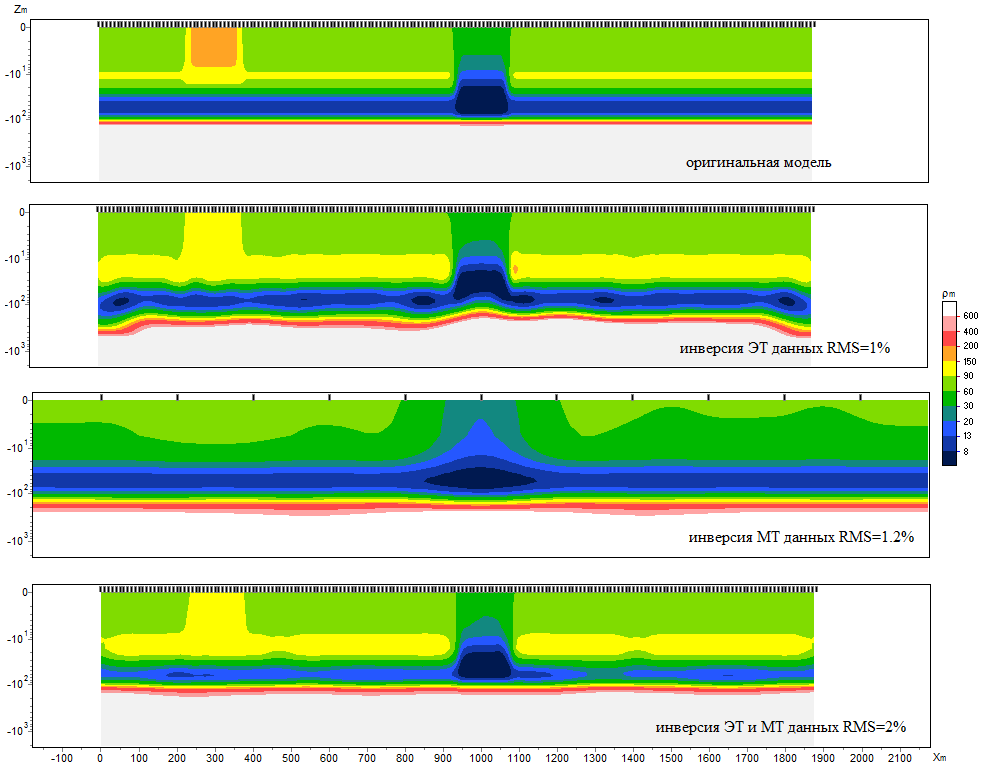
Рис.2. Результаты тестирования алгоритма на синтетическом примере.
Еще одна проблема возникает при недостаточном глубинном перекрытии электротомографии и магнитотеллурических зондирований. В этом случае в разрезе может появиться своеобразная буферная зона, природа возникновения которой связана с нехваткой данных того или иного метода.
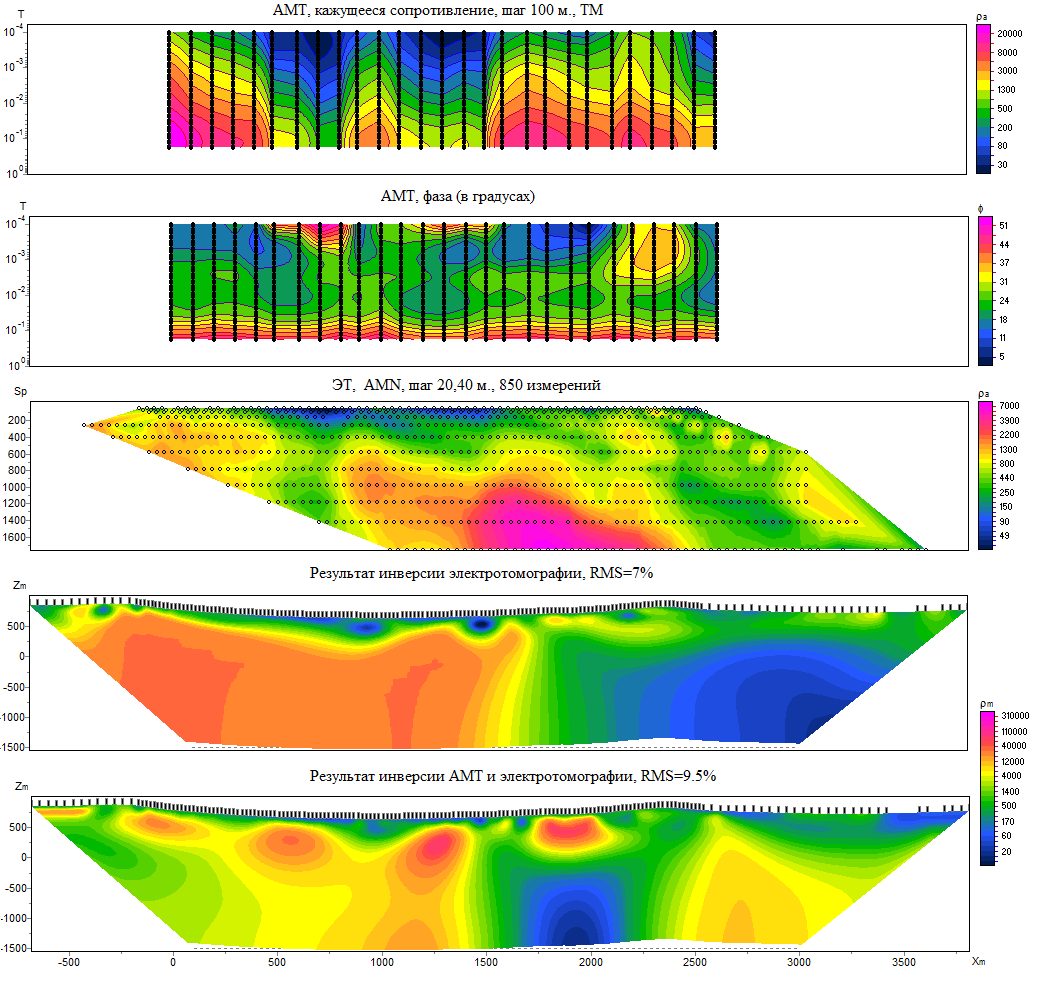
Рис.3. Результаты совместной 2D инверсии данных электротомографии и аудиомагнитотеллурических зондирований.
Разработанный алгоритм опробован на синтетических (Рис.2) и полевых примерах. На рисунке 3 показан результат совместной интерпретации данных электротомографии и АМТ, любезно предоставленных компанией ”Северо-Запад”. Каждый из использованных методов дополняет другой, что позволяет лучше разрешать параметры геоэлектрического разреза, т.е. решить геологическую задачу.

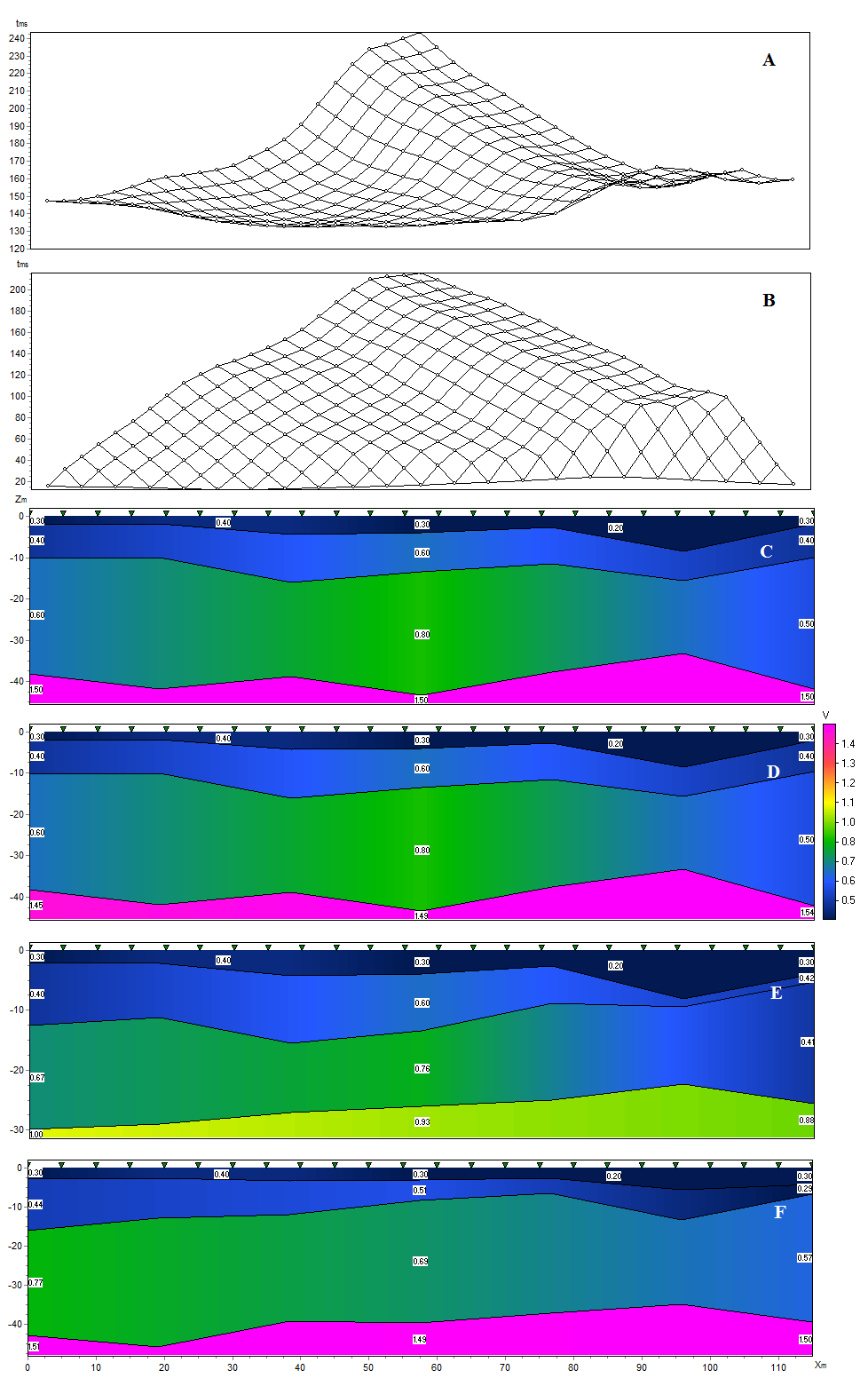
Рис.4. Результаты совместной 2D инверсии данных электротомографии и радиомагнитотеллурических зондирований.
На рисунке 4 показан результат совместной интерпретации данных электротомографии и РМТ, любезно предоставленных компанией ”Ленгипротранс”. Использование совместной инверсии позволило существенно улучшить разрешение результатов и подавить эквивалентность второго слоя.
Полученные результаты свидетельствуют о необходимости совместной интерпретации данных электротомографии и магнитотеллурических зондирований при решении сложных геологических задач.
Литература
1. Новые подходы к интерпретации
геофизических материалов, Каминский А.Е., Лухманов В.Л., Тезисы докладов EAGE, Engineering Geophysics, 2012.
2.
Joint Inversion of Geophysical Data, Vozoff
K., Jupp D., Geophysical Journal of the Royal Astronomical
Society, Vol. 42, No. 3, 1975
3. Программа совместной интерпретации данных
электрических и электромагнитных зондирований NWCOMPLEX1D, Каминский А.Е., Яковлев
Д.В., Алексанова Е.Д. Тезисы докладов EAGE, Engineering Geophysics, 2011.
4.
The joint use of transient electromagnetic
and vertical electric sounding in groundwater prospecting, Tarasov V, A
Kaminsky A., Extended abstract, Geophysics of the 21st Century - The Leap into
the Future, 2003.